The humanoid robotics sector may be approaching an inflection point—quietly, and without the headline numbers typically associated with industrial scale.
Recently, Figure AI reported that it has delivered a cumulative 350 Figure 03 humanoid robots. More notable than the total, however, is the pace of change behind it: over the past 120 days, the company increased production capacity by roughly 24×, moving from one robot per day to one per hour. Weekly output is expected to reach around 55 units.
On its own, 350 units does not constitute scale. But the shift in production cadence may signal something more consequential: humanoid robots are beginning to transition from engineered systems to manufactured products.

Source: Figure
1. From Prototypes to Production Systems
Until recently, most humanoid robots have remained in what could be described as a pre-industrial phase—low-volume builds, high unit costs, and deployment largely confined to pilots or demonstrations.
What distinguishes Figure’s recent progress is not shipment volume, but the emergence of repeatability at multiple levels:
- Assembly repeatability: consistent cycle times across builds
- Component interchangeability: reduced need for manual tuning or rework
- Test standardization: clearer pass/fail criteria rather than engineering validation
Moving from daily to hourly output suggests that at least part of the system—mechanical architecture, wiring harnesses, actuator integration—has crossed a threshold where variance is being engineered out of the process.
That transition is critical. Without it, scaling remains linear and labor-intensive. With it, production begins to follow a curve.
2. Manufacturing as the Constraint—and the Breakthrough
While much of the humanoid narrative has focused on perception, control, and AI capability, the near-term bottleneck is increasingly physical: how to manufacture complex electromechanical systems at consistent quality and cost.
Figure’s ramp highlights three structural shifts.
1) Product convergence reduces system variance
Humanoid systems are inherently high-complexity machines. Without convergence in design:
- actuator configurations vary
- calibration becomes unit-specific
- assembly time becomes unpredictable
A more defined product architecture reduces this variability, enabling scalable production logic.
2) Process stabilization enables throughput scaling
Increasing output is not equivalent to scaling production systems. The latter requires:
- balanced production lines
- reduced manual intervention
- standardized test and validation procedures
The transition to hourly output suggests that at least part of this process architecture is now being formalized.
3) Supply chain synchronization becomes the limiting factor
As production scales, constraints shift upstream:
- actuator supply consistency
- precision component availability
- subsystem integration timing
At this stage, humanoid production becomes less about robotics innovation and more about industrial coordination across multiple tiers of suppliers.
3. A Parallel Development: China’s Multi-Path Scaling Model
While Figure AI is pursuing a tightly controlled scaling path centered on manufacturing discipline, China’s humanoid robotics ecosystem is evolving through a fundamentally different structure—one defined by parallel scaling across multiple companies and application layers.
Rather than a single dominant trajectory, China is effectively testing several scaling models simultaneously.
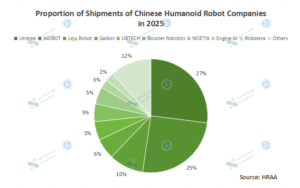
Recent industry data suggests that China now accounts for a large share of global humanoid robot deployments, with multiple firms moving beyond pilot-stage experimentation into early industrial use cases.
Importantly, this shift is not uniform—it is distributed across different scaling logics.
1) Industrial deployment focus: UBTech Robotics
UBTech Robotics represents the most deployment-oriented path.
- Focus on manufacturing and logistics environments
- Integration with enterprise workflows rather than standalone systems
- Transition from pilots toward early commercial deployment
Recent industry estimates suggest increasing deployment activity in factory settings, particularly in structured environments such as automotive and electronics manufacturing.
Key distinction vs Figure:
UBTech is primarily solving the deployment integration problem, while Figure is optimizing manufacturing throughput of a converged product.

2)Cost and volume scaling: Unitree Robotics
Unitree Robotics represents a different scaling logic centered on cost and accessibility.
- Strong emphasis on vertically integrated supply chain
- Aggressive pricing strategy relative to peers
- Faster iteration cycles and broader product accessibility
In contrast to Figure’s controlled manufacturing ramp, Unitree’s approach prioritizes market expansion through affordability and volume absorption.
Key distinction vs Figure:
Where Figure is compressing manufacturing uncertainty, Unitree is compressing market entry barriers.

3)Ecosystem expansion: Fourier Intelligence
Fourier Intelligence follows a third trajectory rooted in ecosystem development.
- Origin in rehabilitation robotics
- Expansion into general humanoid platforms
- Strong emphasis on research, education, and developer engagement
Rather than optimizing for immediate production scale, Fourier is expanding application breadth and technological diffusion.
Key distinction vs Figure:
Figure is optimizing for vertical manufacturing scale, while Fourier is optimizing for horizontal ecosystem expansion.
4)Structural divergence: concentrated scaling vs distributed scaling
The contrast between Figure and China is therefore not simply a matter of progress stage, but of where scaling pressure is absorbed:
- Figure AI
→ concentrates complexity into manufacturing execution and process control - China’s ecosystem
→ distributes complexity across deployment, cost engineering, and application diversity
This leads to two distinct scaling models:
- Vertical scaling of a single converged product (Figure)
- Horizontal scaling across multiple industrial pathways (China)
4. Where the Bottlenecks Shift Next
As humanoid systems move beyond prototype-scale production, the nature of constraints is also shifting.
1) From engineering to operations
The question is no longer whether humanoids can function, but whether they can operate continuously under real-world constraints.
2) From hardware performance to system integration
Even with improved hardware reliability, deployment depends on:
- workflow redesign
- safety validation
- human-machine coordination
3) From innovation to coordination
Scaling increasingly depends on:
- supplier alignment
- production planning
- quality assurance systems across tiers
These are less visible than algorithmic breakthroughs, but more determinative for near-term industrialization.
Conclusion
It remains early in the development of humanoid robotics as an industry. Production volumes are still limited, and large-scale deployment has not yet been demonstrated consistently across environments.
However, the shift from one robot per day to one per hour suggests that at least part of the system has crossed a critical threshold—from experimental construction to repeatable manufacturing.
Whether that transition can extend across cost, reliability, and deployment complexity will determine how quickly humanoid robotics moves from technical possibility to industrial reality.