In the history of humanoid robot development, universities have always played the role of “starting point”. Whether it is control algorithms, perception systems, or cognitive logic behind embodied intelligence, they are almost all born in university laboratories. But after the technological breakthrough, whether it can really go out of the laboratory and move towards application scenarios is always a more difficult question.
Zhejiang University is one of the few universities that has turned “making it” into “using it”. Since the launch of humanoid robot research in 2006, Zhejiang University has gradually built up the system capabilities of perception-control-motion integration, and through platform co-construction, enterprise linkage and scene transformation, it has formed a unique “Zhejiang University system”.
From prototype to platform: Zhejiang University’s exploration of humanoid robot technology
Zhejiang University is one of the earliest universities in China to carry out undergraduate teaching of robots. In 2002, Zhejiang University Robotics Science and Education Practice Base was built. As early as 2006, it began to study humanoid robots and chose to start with a small humanoid robot that can “kick a ball”, embarking on an evolutionary path from prototype exploration to system capability construction.
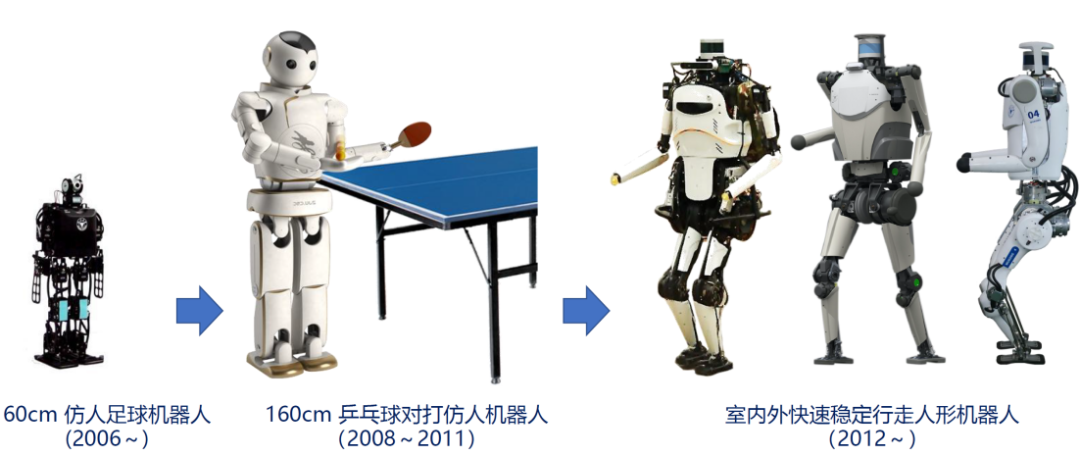
Image source: Zhejiang University humanoid robot research
1. Initial exploration: from “kicking the ball” to “playing the ball”
From 2008 to 2011, the Zhejiang University team, with the support of the national “863” plan, developed a humanoid robot that could play table tennis with humans. This robot is 1.65 meters tall, weighs 56 kilograms, has 30 degrees of freedom, and can recognize the trajectory of the table tennis ball in real time during high-speed movement and respond quickly.
The lightweight structural design, real-time motion planning and dynamic stability control made this robot the focus of the media for a time, and it was also included in the report submitted by the National Science Foundation of the United States to the Obama administration, becoming the highlight of robot research in Chinese universities at that time.

But problems also followed: the robot relied on its lower limbs to maintain balance when playing the ball, but its walking speed was only 1.2 kilometers per hour. When facing high-speed confrontation, it “reacted quickly and moved slowly”, and its practicality was greatly reduced.
2. Deepening of capabilities: entering real and complex scene
Starting in 2012, the Zhejiang University team decided to “make the robot really move.” They will shift their research focus to all-terrain autonomous walking, coordinated movement of upper and lower limbs, dynamic disturbance recovery and other capabilities that are closer to real-life scenarios.
Over the past decade, the team has been working hard on the robot motion system – from drive structure, transmission system to motion control algorithm, motion learning model, one detail after another has been gradually polished.
In 2023, Zhejiang University’s humanoid robot will be able to walk at a speed of 6 km/h, go up and down a 15-degree slope, jump off a 20-cm high platform, and remain stable in unstructured terrain. This means that it is no longer just a “demonstration in the laboratory” but has the potential to become an application platform.
 3. Platform construction: Towards the era of embodied intelligence
3. Platform construction: Towards the era of embodied intelligence
When robots can not only “move”, but also perceive the environment, understand tasks, and make autonomous decisions, the prototype of embodied intelligence appears. As technical capabilities gradually evolve from “demonstration type” to “engineering type”, Zhejiang University has begun to focus on how to platformize and generalize embodied intelligence technology and explore deep collaboration with the industry.
In terms of research path, Zhejiang University has strengthened the control research on the coordination of multi-degree-of-freedom systems on the one hand, and improved the dynamic response ability of robots in complex environments; on the other hand, it is also building a more open and general cognitive framework, so that robots have a certain degree of task understanding, strategic reasoning and adaptive behavior generation capabilities when facing unstructured tasks.
Compared with the traditional idea of “making robots move”, embodied intelligence emphasizes the closed-loop coordination between perception, body and environment. Zhejiang University’s research is also shifting from “execution ability” to “understanding ability”, pushing robots to truly enter complex real-life scenarios.
From people to enterprises: the promoters behind the “Zhejiang University system”
For university technology to go out of the laboratory, it is often inseparable from a group of people who “understand both scientific research and engineering”. At Zhejiang University, the reason why the research on humanoid robots and embodied intelligence can continue to advance and gradually move from technological breakthroughs to real transformation is largely due to the promotion of such a group of deep participants.

Figure: Some “Zhejiang University” embodied intelligent robot-related companies (organized based on public information on the Internet, please make a correction if there are any incomplete points)
1. Key figures: from scientific research leaders to “transformation designers”
Professor Xiong Rong is one of the most representative faces in the field of humanoid robots at Zhejiang University. She has long focused on research in humanoid robots, complex environment perception, intelligent decision-making, etc., and is the person in charge of many national key projects. At the same time, she is also the chief scientist of the Zhejiang Humanoid Robot Innovation Center and the chairman of IPLUSMOBOT.
Associate Professor Zhu Qiuguo has been engaged in research on humanoid robots, bionic robots, machine intelligence, etc. for a long time. He is also the founder and CEO of Deep Robotics, one of the “Six Little Dragons of Hangzhou Science and Technology”.
In addition, a group of young scholars and technology transformation personnel are constantly emerging, supporting the continuous evolution of the “Zhejiang University System” in the field of embodied intelligence.
2. Scientific research platform: the “middle ground” connecting laboratories and industrialization
Another path outside of scientific research is the integration of platformization and enterpriseization. In recent years, a cooperative ecology has gradually formed around the “Zhejiang University System”, which has shifted from technology-led to application-driven.
Zhejiang Humanoid Robot Innovation Center is one of the key hubs of this ecosystem. Here, a series of embodied intelligent technology platforms were incubated, and the “Navigator” series of humanoid robots were also born. These platforms are no longer just prototypes for paper publication, but have begun to contact complex variables in the actual environment and try to respond to the needs of the industry.

Figure: “Navigator II” robot of Zhejiang Humanoid Robot Innovation Center
Zhejiang University Kunshan Innovation Center focuses on providing high-reliability spatial perception and positioning research results for mobile robots, humanoid robots, and drone systems in scientific research.
In addition, Zhejiang University Robotics Research Institute, School of Control Science and Engineering and other on-campus institutions are also constantly engineering and modularizing research results to provide companies with integrated basic capabilities.
3. Linked enterprises: “Zhejiang University System” is building an embodied intelligent ecosystem
If technology is to enter the market in the end, it cannot avoid the participation of enterprises. In the extended chain of “Zhejiang University System”, a number of companies have established stable relationships with it through incubation, cooperation or technology transfer.
For example, Deep Robotics and Zhejiang University jointly built the “Embodied Intelligent Robot Engineer Center”. The two parties will carry out in-depth cooperation around the platform co-construction, technological innovation, and outstanding talent training in the field of embodied intelligent robots; the continuation of the “Zhejiang University gene” can also be seen behind young embodied intelligent technology companies such as Spirit AI and NOEMATRIX.

Figure: Deep Robotics Robot Products
These companies are not only the “landing point” for scientific research results, but also the real scene providers for feedback needs, product verification, and co-construction of platforms.
From laboratory to market: possible samples of university transformation
Zhejiang University’s embodied intelligent robot practice is actually answering a more general question: How can scientific research results in universities really go outside the laboratory?
In fact, in a technology-intensive field such as humanoid robots/embodied intelligence, which is still in the early stages of the industry, the starting points of almost all core links are still in universities. But the reality is that many results remain in the paper or prototype stage and are difficult to enter the actual scene. The exploration of the “Zhejiang University system” provides a possibility: universities not only make results, but also try to push them step by step into the real world.
But it must be admitted that this road is not easy to take. It not only requires the scientific research team to have engineering thinking, but also requires stable resource support, flexible mechanism guarantee, and even relies on the coordination and cooperation of regional industries. This is still a challenge for most universities.
Note:
Logistics Automation Development Strategy & the 7th International Mobile Robot Integration Application Conference Southeast Asia will be held in Concorde Hotel Kuala Lumpur, Malaysia on 21st August 2025. Welcome to join us.
For agenda, please click https://cnmra.com/logistics-automation-development-strategy-the-7th-international-mobile-robot-integration-application-conference-southeast-asia-21st-august-2025-concorde-hotel-kuala-lumpur-malaysia/
For registration, please click https://docs.google.com/forms/d/e/1FAIpQLSdGHjpHRU0mR0_2ZlqtJpUV25s3XlIIHtkkUUfxz0W6vpBqiA/viewform?usp=header