In the warehouse of logistics giant GXO, three humanoid robots are working in a tense and orderly manner. They represent two major technological routes in today’s humanoid robotics field: the bipedal robots Digit and Apollo, and the wheeled robot Reflex.
Digit collaborates with AMRs to transport approximately 18 kilograms of goods to the conveyor belt, completing order fulfillment. Apollo, on the other hand, handles lighter cardboard boxes as a complement to GXO’s humanoid robot strategy. Meanwhile, Reflex navigates between shelves to pick small items.
Despite each robot having its specific role, the increasing complexity of tasks and demands for efficiency have revealed significant differences in the performance of wheeled and bipedal humanoid robots in practical operations.
Who lands faster?
In narrow aisles and spaces, Reflex leverages its wheeled chassis for omnidirectional movement and flexible robotic arms, achieving fast and precise sorting operations. Additionally, Reflex’s vertically extendable body design enhances its adaptability, allowing it to maintain efficient operations in constrained environments.

In such settings, bipedal robots face disadvantages. While bipedal robots like Digit and Apollo possess the ability to mimic human gait, their task execution speed is slower in tight spaces and may require structural adjustments in the storage area to operate effectively.
On the other hand, wheeled robots exhibit higher mobility on flat surfaces, boasting longer endurance for long-distance transport tasks and greater load capacity. As a result, wheeled robots have a broad application prospect in warehousing and logistics scenarios.
Moreover, compared to the price of over $100,000 for bipedal robots, wheeled humanoid robots are more cost-effective. Reflex is priced below $50,000, significantly lowering the market entry costs.
GXO’s use case suggests that, in practical applications, wheeled robots, with their higher technological maturity, stability, and cost advantages, appear to have greater market potential.
While bipedal robots still dominate the market for new humanoid robots launched in the first half of 2024, the number of robots utilizing wheeled chassis is gradually increasing. As humanoid robots expand into industrial and commercial scenarios, their development is shifting from a focus on “human-like” forms to practical functionality, accelerating product commercialization and market expansion.
While bipedal robots still dominate the market for new humanoid robots launched in the first half of 2024, the number of robots utilizing wheeled chassis is gradually increasing. As humanoid robots expand into industrial and commercial scenarios, their development is shifting from a focus on “human-like” forms to practical functionality, accelerating product commercialization and market expansion.
Driven by this trend, many companies are also gradually transitioning to wheeled robot technology. For example, the well-known foreign humanoid robot company Sanctuary AI revealed in a 2024 patent that it is developing a design to mount bipedal robots onto a wheeled chassis, enabling task completion through a mobile base.
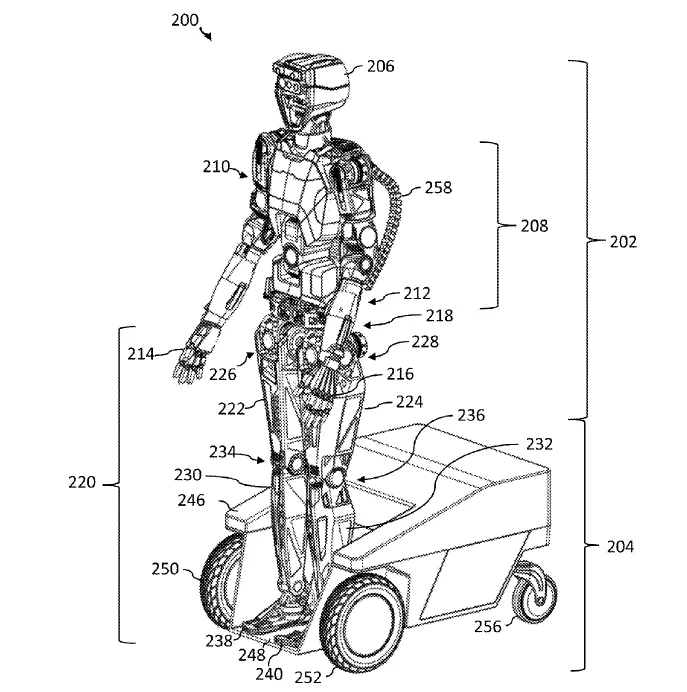
Sanctuary AI’s founder, Geordie Rose, has publicly stated that bipedal designs have inherent limitations, describing the choice to design humanoid robots with two legs as “foolish.” As a result, the industry generally anticipates that the first batch of robots from Sanctuary AI will adopt a wheeled mobility approach.
At the 2024 World Robot Conference, companies like GalaxyBot, UniX AI, PaXini Tech, and Astribot showcased their wheeled robots’ solutions for commercial and everyday scenarios. Meanwhile, developers of bipedal robots, such as Leju and Agibot, also launched new wheeled robot products.

During the conference, a representative from a wheeled robot development company remarked, “Although bipedal technology is advancing, wheeled robots remain the superior solution for industrial and commercial applications in the short term.”

Who has broader applications?
While wheeled robots demonstrate speed advantages in the market, bipedal robots remain indispensable in specific application scenarios.
UBTECH has noted that wheeled robots typically operate in two-dimensional planes, struggling to adapt to 3D environments that require navigating stairs or slopes.
The design of bipedal robots, which mimics natural human gait, provides superior flexibility and adaptability in complex terrains.
Fields such as research, rescue, and exploration often involve high-complexity environments, including irregular landscapes, steep slopes, and areas with multiple obstacles. In these scenarios, bipedal robots can leverage their human-like gait and flexible limbs to complete cross-task and cross-scenario missions. 
However, achieving bipedal movement is extremely challenging, requiring intricate balance control, gait planning, and the coordination of multiple joints, as well as dynamic obstacle avoidance. This complexity results in high costs and unstable performance, posing significant challenges for commercialization.
Consequently, many companies are adopting a “dual approach” strategy: on one hand, developing wheeled humanoid robots to accelerate market entry, and on the other, continuing to advance bipedal robots to expand future application possibilities.
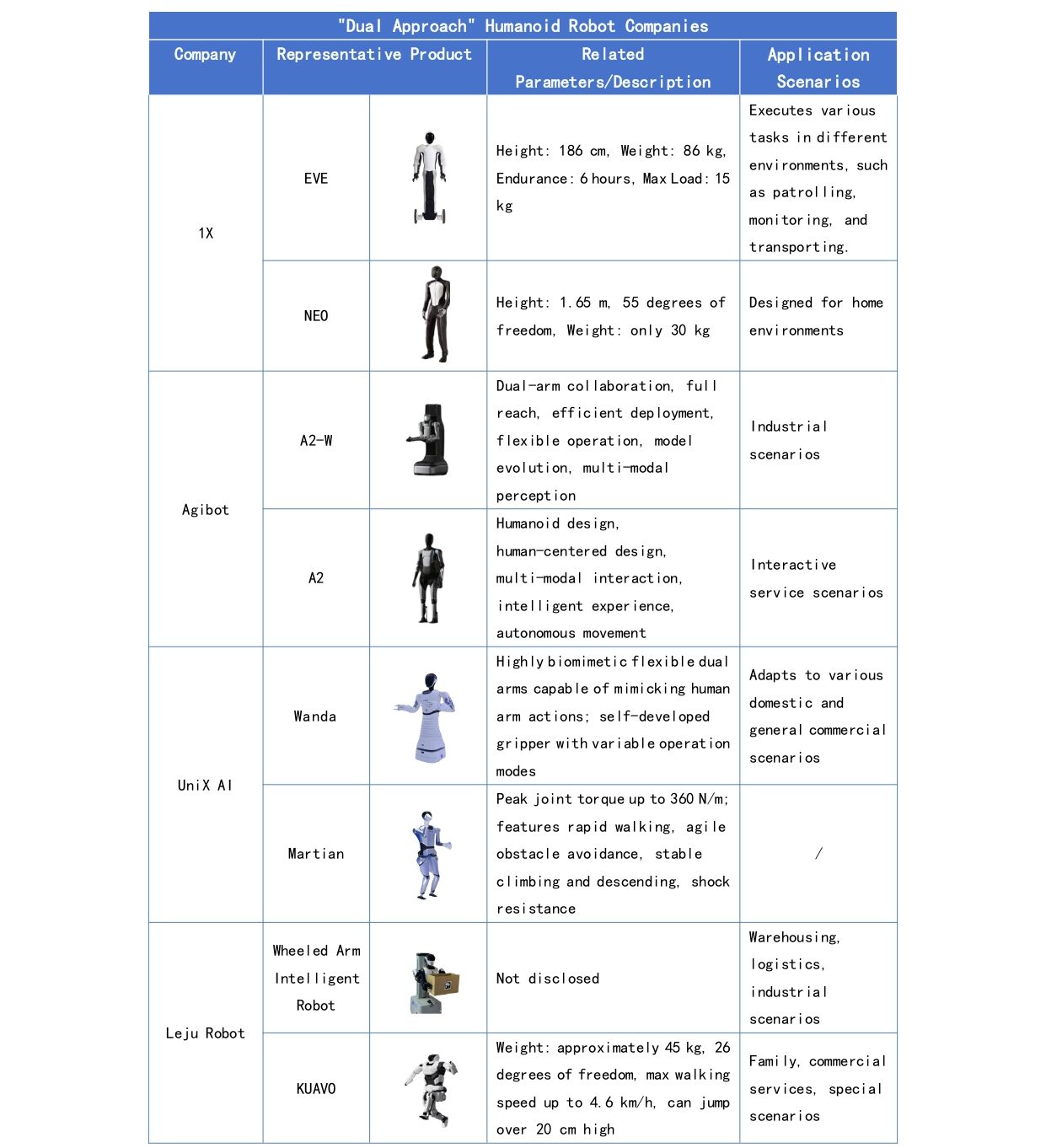
For instance, Agibot has recently launched five new robots encompassing both bipedal and wheeled forms, suitable for interactive services, research education, and flexible manufacturing.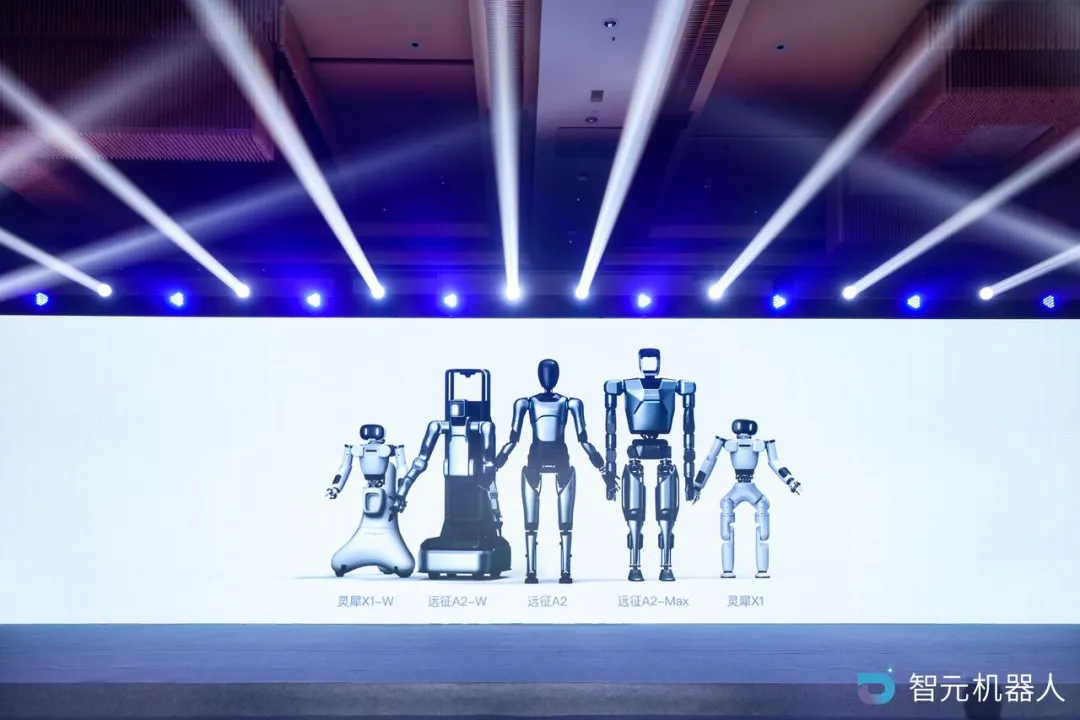
Notably, 1X Technologies’ wheeled robot EVE has already achieved mass delivery, while the company focuses on advancing its bipedal humanoid robot NEO.
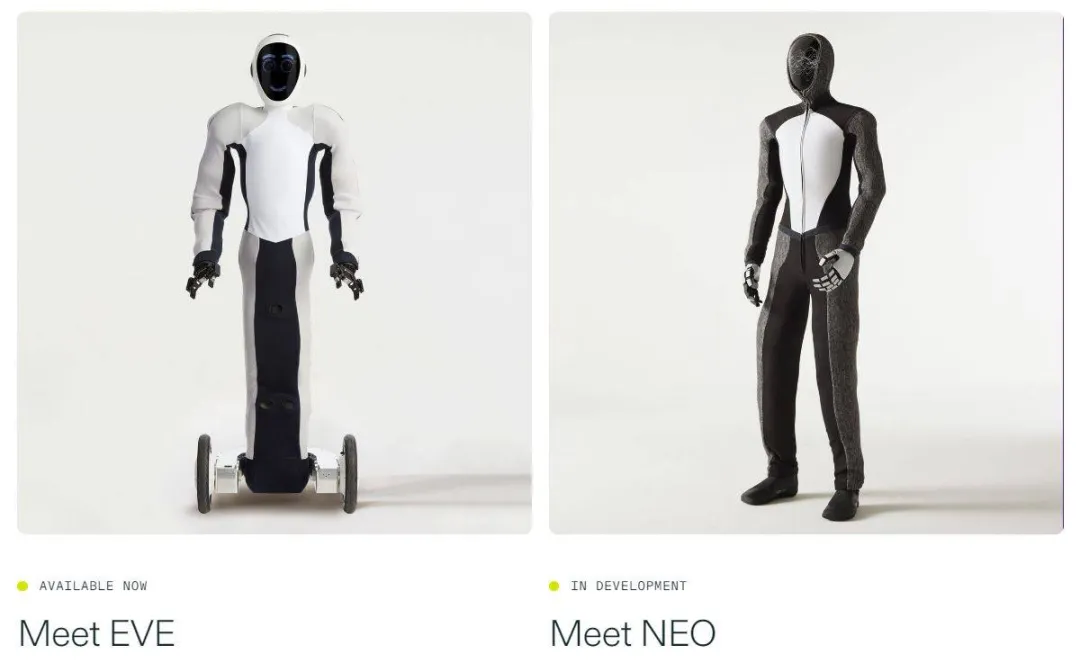
Recently, 1X launched the prototype of NEO, called NEO Beta. In the demonstration video, NEO showcased a high degree of flexibility, being able to autonomously “observe” and predict human actions.
This robot stands 1.65 meters tall, has 55 degrees of freedom, and weighs only 30 kilograms. For reference, Tesla’s Optimus Gen2 weighs 57 kilograms, and Figure 02 weighs 70 kilograms.
1X states that NEO was designed from the outset for the consumer market. Despite its lighter weight, its strength is comparable to that of mainstream bipedal robots. Among current bipedal robots, NEO is uniquely positioned for home environments, while most bipedal robots primarily serve industrial sectors.
Currently, humanoid robots targeting home environments are mainly wheeled, such as UniX AI’s Wanda and Astribot’s S1. However, wheeled humanoid robots face significant limitations in home settings. Unlike industrial environments, home environments are highly non-standardized and may present challenges such as navigating stairs.
Moreover, nearly all companies producing wheeled robots have not ruled out the future use of bipedal configurations. As bipedal technology continues to advance, there is a possibility that bipedal robots could become mainstream in home scenarios once they reach a critical point. These cases illustrate that while the commercialization of bipedal technology is relatively slow, its irreplaceability in specific contexts will drive ongoing development.
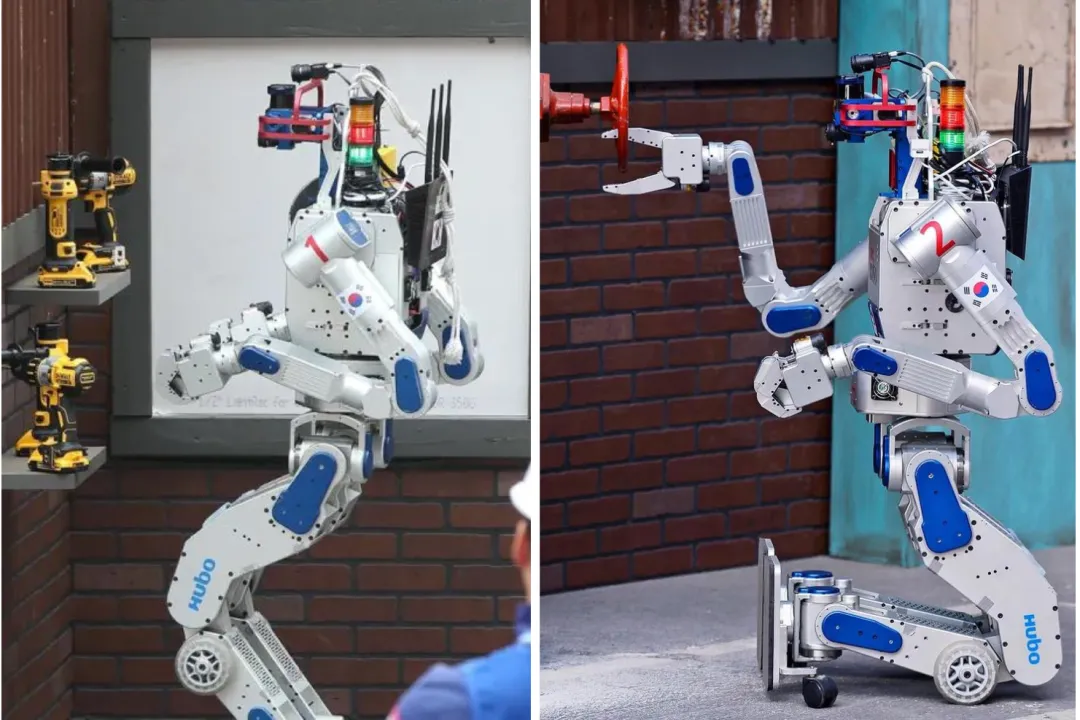
Notably, there is also a trend emerging in the market that blends both technological routes. For instance, the DRC-Hubo+ can stand and walk on two legs or kneel down and move using wheels. This hybrid model may find a balance in the future, maintaining the flexibility of bipedal movement while leveraging the efficient mobility of wheeled designs.
In conclusion:
From a developmental perspective, bipedal and wheeled designs are not mutually exclusive; rather, they provide specific solutions tailored to different needs and scenarios. With advancements in technology, we may see the emergence of hybrid mobility methods or intelligent switching mechanisms that enhance adaptability and functionality.
Currently, the choice between bipedal and wheeled robots is more application-driven than a debate over which technology is superior. As humanoid robots continue to explore new application areas, these two mobility methods may gradually converge.