In just one month, the humanoid robot industry has staged a “somersault competition,” with multiple companies releasing videos of high-difficulty maneuvers. In February, Zhongqing Robotics achieved the world’s first frontflip. Shortly after, Songyan Dynamics showcased its N2 robot performing multiple consecutive backflips in March. On March 19, Yushu Technology’s G1 robot pushed boundaries by executing the world’s first *sideflip* in place.
Even Boston Dynamics, the pioneer of humanoid robot backflips, joined the fray, releasing a new video of its electric Atlas robot demonstrating acrobatic feats like rolls, breakdancing, and Thomas flares.
From frontflips and backflips to sideflips, humanoid robots are becoming increasingly “competitive.” What does this “spectacle of skills” truly signify?
From “Standing Firm” to “Somersaults”: The Evolution of Humanoid Robot Mobility
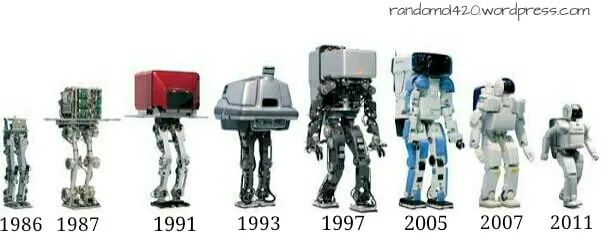
Over mere decades, humanoid robots have leaped from basic stability to complex aerial maneuvers, marking a quantum leap in motion control technology.
Early Stages: Walking Was Already a Challenge
In the late 20th century, humanoid robotics was in its infancy.
In 1973, WABOT-1, developed by Japan’s Waseda University, became the world’s first bipedal humanoid robot. Though groundbreaking, it moved slowly and relied on pre-programmed gait trajectories.
Honda’s ASIMO, launched in the late 1990s, epitomized this era. These early robots prioritized static balance but struggled with dynamic adjustments, often losing balance under minor disturbances.
Running, Jumping, and Extreme Maneuvers
The 2010s saw breakthroughs in reinforcement learning and optimization algorithms. Boston Dynamics’ hydraulically driven Atlas robot pioneered running, jumping, and climbing—actions demanding real-time balance, force coordination, and dynamic control. These advancements laid the groundwork for high-difficulty stunts like flips.

Escalating Difficulty: Backflips to Sideflips
Boston Dynamics’ Atlas made history in 2017 with the first humanoid backflip. This milestone sparked global interest in pushing robotic limits.
In January 2024, Magic Atom’s electric humanoid robot executed the first electric-driven backflip using its proprietary D190 joint module.
By March 2024, Yushu Technology’s 1.8-meter-tall H1 robot achieved an in-place backflip, highlighting advancements in both algorithms and electric-drive dominance over hydraulics.
February 2025 saw Zhongqing Robotics’ frontflip breakthrough, requiring precise mid-air balance and lightweight yet powerful joints. Then, on March 19, 2025, Yushu’s G1 robot raised the bar again with the first sideflip, demanding simultaneous control of vertical and horizontal rotation axes—a testament to structural rigidity and real-time motion algorithms.
These feats reflect holistic progress in power systems, control algorithms, and mechanical design, underscoring the vast potential for future applications.
From “Flipping High” to “Going Far”: The Real Significance Behind the Acrobatics
While flashy, these stunts are rooted in critical advancements: high-density servo motors, lightweight structures, reinforcement learning, and model predictive control (MPC). Such technologies enhance robots’ stability, adaptability, and precision—skills vital for navigating uneven terrain, disaster zones, or confined spaces.
For instance, the balance and rapid adjustments required for flips translate directly to real-world scenarios like search-and-rescue missions, where robots must traverse debris or adapt to sudden obstacles. Future robots with such agility could operate in hazardous environments, reducing human risk.
“Competing” Toward the Future: What’s Next?
Challenges remain: achieving faster, more stable multi-axis rotations, balancing energy efficiency with high performance, and integrating biomimetic structures or adaptive algorithms. The goal is not just “flashier flips” but smarter, more efficient motion planning and broader commercialization.
Ultimately, somersaults are just the beginning. The true challenge lies in ensuring humanoid robots “flip” into the future—stably, intelligently, and ubiquitously across all facets of human life.
——Flipping is a starting point. The real test is how humanoid robots will “somersault” into tomorrow.