
In the first half of 2025, the field of humanoid robots ushered in a period of intensive release of new products. According to incomplete statistics from the New Strategy Industry Research Institute, more than 75 new humanoid robot products were released worldwide in the first half of 2025, with an average of one new model released in less than three days.
In the first quarter, there were more than 35 new humanoid robots, including 21 domestic ones and 14 overseas ones.
| Enterprise | New product | Related parameters/introduction |
|
Domestic |
||
| GALAXEA | R1 series | Including three models: R1 Pro, R1 and R1 Lite. It is standard with Nvidia Jetson AGX Orin 32GB platform, with 8-core CPU and 200 TOPS GPU computing power |
| APLUX | Ultra Magnus | Equipped with Qualcomm QCS8550 processor, the robot’s motion control, perception, decision planning and voice interaction are realized by integrating the architecture operating system and edge AI technology |
| TETRAELC | Tiankui No. 1 | Height: 220cm, load capacity: 25kg, endurance: 5 hours, 30 degrees of freedom. Single arm end load can reach 15kg, and the waist folding and lifting design makes vertical extension of the highest end of the arm reach 3m |
| iSOFTSTONE | Tianhe C1 | Based on the self-developed Nebula embodied intelligent computing platform, it adopts the modular technology architecture of algorithm software defining hardware, provides a rich atomic action algorithm library, and supports the access of various large models |
| DEXFORCE | DexFoece W1 | Height 170cm, maximum load of both arms 20kg, endurance 8 hours, equipped with DexBrain space and embodied intelligent brain |
| CHAONENG ROBOT | Xiangjiang No. 1 | It is committed to realizing health care functions such as “assisting medical treatment, assisting walking, assisting recreation, assisting power, assisting meals, assisting convenience and assisting bathing” |
| RoboSense | Self-developed humanoid robot machine | It is defined as a general robot parts development platform and the “master” for the research and development of various incremental robot parts and solutions |
| Stial | StialSteven | Focusing on polishing scenes, it has more human-like motion characteristics and excellent flexibility and adaptability, which is suitable for fine polishing operations in complex workpieces and small spaces |
| Li-Gong | LeadIn F1 | The full-size wheeled humanoid robot has the ability of efficient movement and flexible operation. It has 30 degrees of freedom in the whole body, and the working precision is +/-0.05mm. The waist adopts three-fold design, and the hand operation can cover the space height of 0.2m-2m |
| EFORT | Yobot series | Wheeled and bipedal robots |
| UBTECH | Tiangong Walker | With a height of 170cm and 20 degrees of freedom, it can run stably at a speed of 10km/h. It has the sports functions of stable movement and anti-impact interference in complex terrain such as hills, steps, sand and snow |
| Dobot | Dobot Atom | The full-size bionic humanoid robot for industrial-level fine operation can realize cross-scenario, multi-machine collaboration and complex operation generalization tasks by carrying the self-developed neural drive dexterous operating system NDS and anthropomorphic straight knee walking system AWS |
| NOETIX | N2 | The machine adopts aluminum alloy structure and plastic shell, with a total weight of only 30kg and a height of 1.2m. It can easily complete high explosive anthropomorphic movements such as 3.5m/s running, continuous backflip and single leg jump |
| Magic Lab | MagicBot | The walking and running posture has tended to be human-like, and can adapt to a variety of environmental terrain such as road, track, grassland and hillside while running |
| Towards AGI | TR4 | As a versatile robot designed for the environment of grid handling system, suitable for both industrial and home scenarios, it can complete various complex tasks independently through intelligent two-arm collaboration |
| AGiBOT | LingXi X2 | Weighing 33 kilograms and standing 1.3 meters tall, the robot can walk, run, spin, dance and even perform complex movements such as cycling like a human by combining deep reinforcement learning and imitation learning algorithms |
| KEENON | XMAN-R1 | It is the first application of embodied brain and embodied cerebellum in commercial service robots in the industry |
| Pudu Technology | FlashBox Arm | It integrates multiple technology stacks of mobile, operation and interaction, and has the ability of generalization operation. It can complete various tasks in various commercial scenarios such as hotel, building, catering, retail and medical care |
| ZTE / TLIBOT | Tina | Through the ZTE Nebula multimodal large model, Tina achieves optimization of language communication, environment perception and motion decision making, enabling autonomous navigation and task execution in complex environments |
| YOUIBOT | Vortex | It is specially designed for large-scale complex indoor scenarios and has the characteristics of long endurance and high flexibility |
| YIJIAHE | RK100 | It has dozens of joints with high energy density, can walk on a variety of roads, and is equipped with an intelligent brain based on YJH-AI large model, which can understand the environment and has generalization operation capability |
|
Overseas |
||
| Foundation | Phantom | It will mainly help the military maintain and refuel aircraft in remote areas. In the future, it may be able to build cars, patrol warehouses and even be deployed to war zones |
| IntBot | Nylo | Interactive humanoid robots for use in retail, healthcare and education |
| Realbotix | Melody | The open source bionic humanoid robot is designed with the ability to upgrade its functionality, adaptability and user experience |
| Humanoid | HMND 01 | Standing 175cm tall and weighing 70kg, it has 41 degrees of freedom. It can carry up to 15kg, walk at a speed of 1.5m/s and has a battery life of about four hours |
| Mentee Robotics | Menteebot V3 | It is 1.75 meters tall, weighs 70 kilograms, is equipped with 360-degree depth camera perception and can carry a load of 25 kilograms |
| Vanar Robotics | Vanar Generation 1 | Defined as biomechanical humanoid intelligence suitable for both business and home use |
| 1X | Neo Gamma | A prototype designed for testing in a home environment. It can perform some household tasks, such as making coffee, doing laundry and vacuuming |
| Clone Robotics | Clone Robotics | With more than 200 degrees of freedom, more than 1,000 muscle fibers and 500 sensors, it simulates the structure of human bones and muscles to achieve natural and flexible movement |
| Dexmate | Vega | It has a high load arm, dexterous hands, foldable torso and arm design, all-directional base movement and 10 hours of long endurance |
| Muks Robotics | Spaceo | The wheeled mobile body can be extended and retracted to adapt to space operations, with a maximum load of 200 kg and a range of more than four hours. The five-finger dexterous hand is used for fine task operation and can communicate naturally with people |
| Agility | A new generation Digit | Effective payload 35 pounds, operating range 5.5 feet, customizable actuators, self docking and charging |
| Agile Robots | Half-human humanoid robot | Fixed on the assembly line or mobile workbench, to carry out human-like fine and complex tasks |
| Westwood Robotics | THEMIS V2 | Height 1.6 meters, weight 31kg-32kg, walking speed 5km/h, running speed 10km/h |
| Autolife Robotics | AutoLife S1 | Height 170cm, weight 50kg, moving speed 40m per minute, single arm maximum load 1kg |
New humanoid robots in the first quarter of 2025 (sorted out based on public information on the Internet, please make a correction if there are any incomplete points)
In the second quarter, there were more than 40 new humanoid robots, including 28 domestic ones and 12 overseas ones.
| Enterprise | New product | Related parameters/introduction |
| Domestic | ||
| Fourier | Fourier N1 | With a height of 1.3 meters and a weight of 38 kg, the body has 23 degrees of freedom of battery; the back is designed to be plugged in and pulled out, and the continuous exercise endurance can reach more than 2 hours |
| DIGIT | Star Ranger P01 | The dual-form design combines the body’s two feet with the wheel “flying soldier mode”, which supports the free switching between the two modes and can flexibly respond to complex environments |
| UBTECH | Walker C | The humanoid robot, which is 163 centimeters tall and weighs 43 kilograms, has 20 degrees of freedom and can run steadily at a speed of 6 kilometers per hour |
| AI2 Robotics | AlphaBot 2 | With full space exploration and perception, 34+ body degrees of freedom, waist and leg lifting structure, vertical working range 0-240cm, single arm span 700mm (excluding terminal fixture), it can work continuously for 6h+ |
| Blinx | X1 | Autonomous navigation is realized through omnidirectional mobile chassis, and a seven-degree-of-freedom bionic joint two-arm system is equipped with electronic skin and force sensors to achieve dynamic collision avoidance and high precision operation |
| WEIBOT | Xingji V | It is about 1.7 meters tall and has basic functions such as imitation of natural human movements, autonomous voice interaction and head animation interaction |
| NOETIX | Hobbs | It has multi-modal embodied interaction, ultra-high degree of freedom (32DOF), nearly human facial expressions, open persona customization and underlying interface, and supports personalized makeup |
| Midea | MIRO Gen1 | It is about 1.9 meters high and weighs 68 kilograms. Its arms are independently developed by Midea, with 16 degrees of freedom and 6 active joints |
| Atom Robot | Tianbing No. 1 | The 37-degree-of-freedom bionic design can carry a sensing device with a load of 6kg. The waist is composed of 6 sets of aerospace aluminum alloy support chains, with a maximum load of 200kg |
| Zerith | Zerith-H1 | It is equipped with the vertical scene operation basic model Zerith-V0; it has a wheeled mobile chassis, and the upper body of the robot can adjust its height at any time according to the task requirements, so as to adapt to different operation scene requirements |
| ROBOTERA | Q5 | Equipped with a bionic 7-axis high-precision mechanical arm and an 11-degree-of-freedom “xhand-lite”, it can complete 10 clicks per second, pick up a 10kg object with one hand, and flex and lift its legs with three degrees of freedom |
| Westlake University | HEART series robots | Special products for the elderly care and service robot market |
| Fujian Newton Technology | Newton Robotics | With “intuitive interaction, safety engineering and high efficiency and reliability” as the core, it is equipped with embedded AI agent to realize real-time dialogue and behavior adaptation |
| ROKAE | Helios、Human.X | Helios integrates embodied intelligence, visual perception and compliant force control technology, with complex operation skills and dynamic scene adaptation ability; Human.X has 54 degrees of freedom, and its maximum load of a single arm is 3KG, with the ability to walk and climb stairs |
| Spirit AI | Moz1 | It has 26 degrees of freedom and is equipped with self-developed integrated force control joint with the highest power density in the world. The load-to-weight ratio is up to 1:1. It is the first high-performance full-body force control robot in China, and also has the leading high-precision and high-speed WBC system in China |
| ESTUN CODROID | Codroid 02 | Height 170cm, weight 70kg, single arm load 5kg, full body freedom of movement up to 31 (excluding dexterous hand) |
| Lumos Robotics | LUS2 | Designed in the proportion of 160cm/55kg; 400N·m joint torque and 3kg load precision operation; NVIDIA Orin chip, 275TOPS computing power, trillions of actions per second decision; 2 hours of continuous high-intensity exercise, 15 minutes of charging for 1 hour |
| Beijing Humanoid Robot Innovation Center | Tiangong 2.0 | With strong movement ability and intelligent adaptation to multiple scenarios, it can run and walk in outdoor complex terrain, while having longer endurance and standing power change capability |
| LY iTECH | Xingzhe, Panshi, Linglong, Lingyue | The walking robot has a humanoid design with 40+ active degrees of freedom; the rock body weighs 230kg and can carry 10kg on one arm, with repeat positioning accuracy of 0.05mm; Linglong adopts lightweight design with 0.03mm repeat positioning accuracy; Lingyue is equipped with 3D vision guidance and seven-axis dual arms |
| Southern University of Science and Technology | Pangu | With highly anthropomorphic bionic robotic arm, artificial intelligence is introduced, and multi-mode sensing and multi-mode large model are adopted to enable two-arm cooperative operation |
| DEXTELEOP | TA Lite | Users wearing VR devices can realize accurate control of remote robots, showing millisecond response speed and extremely low latency in complex turning, fine grasping and other operation scenarios |
| Standard Robots | DARWIN-01 | It has 23 degrees of freedom, a load capacity of up to 10kg, and can be automatically recharged or replaced with a battery for up to 12 hours |
| FUWEI | Fuzhi No. 1 and Fuzhi No. 2 | Fuzhi No. 1 adopts the wheel structure and folding lifting design, which can cover the full operation space of 0-2.2 meters, and the assembly accuracy is up to ±0.05mm; Fuzhi No. 2 adopts the wheel structure and lifting design, and the double arm load force is up to 8kg |
| Overseas | ||
| Kinisi | KR1 | Low-cost, versatile robots designed for practical tasks. Combining human strength and precision with onboard intelligence to operate autonomously |
| igus | Iggy Rob | With a height of about 1.7 meters and an autonomous operation of 8 hours on a single charge, it is equipped with various devices to achieve smooth movement and interaction in dynamic environments |
| K-Scale Labs | K-Bot | It is 1.4 meters high, weighs 34 kilograms, has a maximum payload of 10 kilograms and a battery life of up to four hours |
| Hugging Face | HopeJR | It has 66 degrees of freedom and can perform complex movements such as walking and waving its arms. |
| NEURA Robotics | 4NE1 Gen3 | Effective load 10-100 kg; height 180 cm; speed 5 km/h; weight 50 kg |
| Wandercraft | Calvin-40 | It utilizes NVIDIA ISAAC platform and visual language model (LLM), supports autonomous navigation and task reasoning, and enables voice command operation |
| Hexagon | AEON | It has a flexible movement ability and cleverly integrates wheels with two feet |
| Vingroup | VinMotion Motion 1 | The full-size humanoid robot, which is in the prototype stage, can do simple walking and waving arms |
| Duatic | Duatic Alpha | It can lift 30 kg and carry 200 kg; it uses hot-pluggable battery to realize autonomous operation all day long |
| ROBOTIS | AI Worker | It has a full-body humanoid platform (19-25 degrees of freedom),
supports hands-on operation, is designed for imitation learning and autonomous strategy training, and is compatible with ROS 2 and physical AI tools |
| Muks Robotics | Spaceo Pro | With a payload of 200 kg, 7 degrees of freedom arms and FusionMax AI, it can automate heavy precision tasks in the manufacturing and logistics fields |
| Mirsee Robotics | MH3 | With advanced mobility, accuracy and security, it is a multi-functional solution to modern workforce challenges |
New humanoid robots in the second quarter of 2025 (sorted out based on public information on the Internet, please make a correction if there are any incomplete points)
Wheeled robots surpassed bipedal robots for the first time, and pragmatism accelerated the dominant technology route
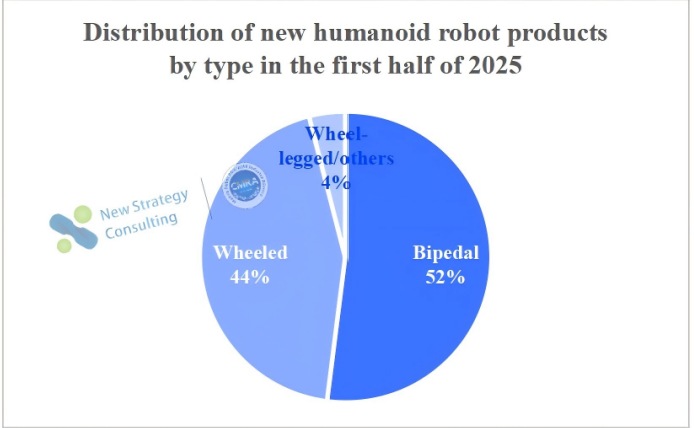
In 2025, a trend that cannot be ignored is that the proportion of wheeled mobile structures in new humanoid robots continues to rise. Data shows that a total of 33 wheeled robots were released in the first half of 2025. Although it is still slightly lower than the 39 bipedal robots, the gap has been greatly narrowed. In addition, there were 3 products that adopted a wheel-legged or other structure, showing the diversified exploration of mobility of those companies.
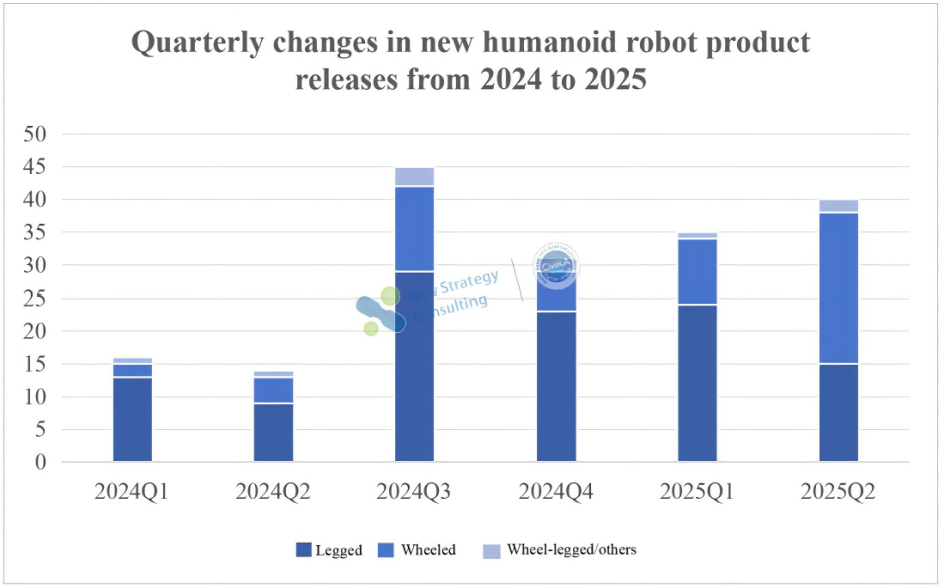
Looking back at the data changes in the past two years, it can be clearly seen that the wheeled solution is rapidly eroding the market share of the bipedal structure, especially in the second quarter of 2025, the number of wheeled robots surpassed the bipedal robots in a single quarter for the first time.
The core logic of this trend lies in “efficiency first”. Compared with the technical complexity and control difficulty of the bipedal structure, the wheeled platform has higher stability, longer battery life, lower cost in indoor scenes, and is easier to access typical commercial environments such as factories and office buildings. For companies that are currently eager to promote commercialization, the wheeled structure has become a “realistic” choice.
The form tends to be concentrated, and three types of product routes are initially formed
In terms of form design, the new humanoid robots in 2025 show a clear trend of convergence. Different from the “hundred flowers blooming” design attempt last year, current product design has basically focused on the following three paths:
- Universal humanoid structure of two legs+ two arms:Pursuing highly humanoid form, with stronger generalization ability, replacing manpower for long-term scenarios, and is a representative of technological idealism;
- Two arms + foldable structure + wheeled chassis: Strengthening the operation and compact deployment capabilities of the robot arm, taking into account movement and stability, suitable for service industry, reception and other scenarios;
- Two arms + lifting platform + wheeled chassis: Focusing on desktop-level operation and industrial collaboration capabilities, the form is between the robot workstation and the collaborative arm, which is closer to short-term industry needs.
The convergence of form shows that the industry is gradually moving from concept verification to the landing application stage. Enterprises no longer blindly pursue appearance simulation, but pay more attention to practicality, task adaptability and platform scalability.
Conclusion: The commercialization window is approaching
In the first half of 2025, the release of new humanoid robots showed “three highs”: high-density release, high-concentration area, and high form convergence. At the same time, the technical routes also show a trend of differentiation: the wheeled structure accelerates commercialization, while the bipedal solution continues to evolve towards high-end generalization capabilities.
The key to this stage is: whoever can first build a closed loop of “product-scenario-value” will be able to establish a competitive advantage in the second wave of landing. Wheeled products may be the first to open the door to the “practical faction”, while the bipedal universal platform is still expected to become the final solution for the “platform faction” after the evolution of technology and the reduction of computing power costs.
There is more than one way for the future of humanoid robots. But 2025 is obviously the starting point for them to truly enter the real world.
Note:
Logistics Automation Development Strategy & the 7th International Mobile Robot Integration Application Conference Southeast Asia will be held in Concorde Hotel Kuala Lumpur, Malaysia on 21st August 2025. At the same time, the2025 Global MobileRobot Industry Development Report will be released. Welcome to join us.
For agenda, please click https://cnmra.com/logistics-automation-development-strategy-the-7th-international-mobile-robot-integration-application-conference-southeast-asia-21st-august-2025-concorde-hotel-kuala-lumpur-malaysia/
For registration, please click https://docs.google.com/forms/d/e/1FAIpQLSdGHjpHRU0mR0_2ZlqtJpUV25s3XlIIHtkkUUfxz0W6vpBqiA/viewform?usp=header




