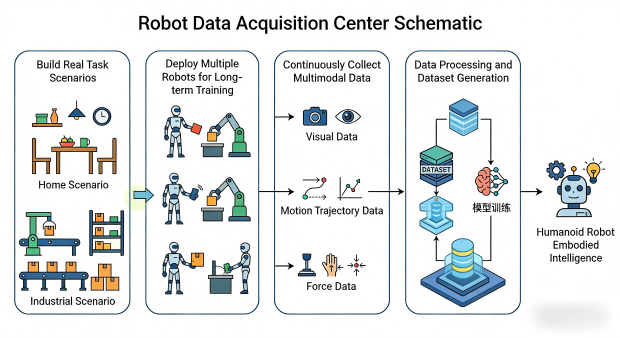
In the embodied intelligence industry, data is becoming the new “oil.” Unlike large language models that rely on textual data, humanoid robots require physical interaction data from the real world—grasping, carrying, organizing objects, and moving and manipulating in complex environments. This type of data is... Continue reading
